
Pomozite razvoju web mjesta, dijelite članak s prijateljima!
S obzirom na činjenicu da se opskrba električnom energijom tradicionalno provodi isporučivanjem izmjenične struje potrošačima, jasno je želja za stvaranjem električnih strojeva koji rade na isporučenoj električnoj energiji. Naročito se izmjenična struja aktivno koristi u asinkronim električnim motorima, koji se široko koriste u mnogim područjima ljudske djelatnosti. Osobito vrijedan pažnje je asinkroni motor s kaveznim rotorom, koji je iz nekoliko razloga zauzimao čvrstu poziciju u primjeni.
Tajna takve popularnosti leži prvenstveno u jednostavnosti dizajna i niskoj cijeni njegove proizvodnje. Električni motori na rotorima s kratkim spojem imaju i druge prednosti koje ćete naučiti iz ovog članka. I prvo, razmotrite značajke dizajna ovog tipa elektromotora.
dizajn
Svaki elektromotor ima dva važna radna dijela: rotor i stator. Zatvoreni su u zaštitnom kućištu. Na osovinu rotora ugrađen je ventilator za hlađenje vodiča za namatanje. To je opći princip strukture svih vrsta elektromotora.
Konstrukcija statora razmatranih elektromotora ne razlikuje se od strukture tih dijelova u drugim tipovima elektromotora koji rade u AC mrežama. Jezgre statora, projektirane za rad u trofaznom naponu, raspoređene su u krug pod kutom od 120º. Oni su instalirani na namotima izolirane bakrene žice određenog presjeka, koji su spojeni trokutom ili zvijezdom. Konstrukcija magnetskog kruga statora je čvrsto postavljena na stijenke cilindričnog tijela.
Struktura elektromotora je jasna iz slike 1. Zabilježite konstrukciju namota bez jezgre u kratkospojnom rotoru.
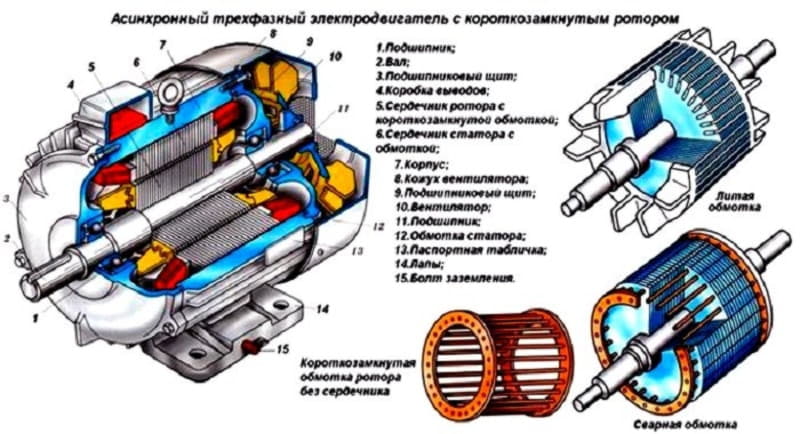
Rotor se malo razlikuje. Dizajn svitka je vrlo sličan kavezu. Sastoji se od aluminijskih šipki, čiji krajevi zatvaraju prstenove kratkog spoja. U motorima velike snage, korištenje bakrenih štapova može se promatrati kao namotaj rotora kratkog spoja. Taj metal ima mali otpor, ali je skuplji od aluminija. Osim toga, bakar se topi brže, a to nije poželjno, jer vrtložne struje mogu jako zagrijati jezgru.
Strukturno, šipke se nalaze na vrhu jezgre rotora, koje se sastoje od transformatorskog čelika. Kod izrade rotora, jezgre se montiraju na osovinu, a vodiči za namatanje pritisnu (uliju) u utore magnetskog kruga. Nema potrebe da se izoliraju žljebovi jezgre. Slika 2 prikazuje sliku rotora s namotima kratkog spoja.

Magnetske ploče takvih rotora ne zahtijevaju površinsku izolaciju laka. Vrlo su jednostavni za proizvodnju, što smanjuje troškove asinkronih elektromotora, koji čine do 90% ukupnog broja elektromotora.
Rotor se rotira asinkrono unutar statora. Između tih dijelova postavlja se minimalna udaljenost u obliku zračnih razmaka. Optimalni razmak je između 0, 5 mm i 2 mm.
Ovisno o broju korištenih faza, asinkroni električni motori mogu se podijeliti u tri vrste:
- jednofazni;
- Dvofazna;
- tri faze.
Razlikuju se po broju i položaju namota statora. Modele s trofaznim namotima karakterizira visoka stabilnost pri nazivnom opterećenju. Oni imaju najbolje početne karakteristike. Ovi električni motori često koriste jednostavnu start-up shemu.
Dvofazni motori imaju dva okomito postavljena statora, od kojih svaki dobiva izmjeničnu struju. Često se koriste u jednofaznim mrežama - jedan namot je izravno spojen na fazu, a kondenzator faznog pomaka koristi se za napajanje drugog. Bez tog dijela, rotacija osovine asinkronog električnog motora neće se pokrenuti samostalno. Zbog činjenice da je kondenzator sastavni dio dvofaznog elektromotora, takvi se motori nazivaju i kondenzatorski motori.
Kod konstrukcije jednofaznog elektromotora koristi se samo jedan radni namot. Za pokretanje rotacije rotora koristi se indukcijski svitak za pokretanje, koji je kratko spojen na mrežu preko kondenzatora ili kratkog spoja. Ovi motori male snage koriste se kao električni pogoni za neke kućanske aparate.
Načelo djelovanja
Rad asinhronog motora provodi se na osnovi trofaznog strujnog svojstva koje može proizvesti rotirajuće magnetsko polje u namotima statora. U razmatranim elektromotorima, sinkrona frekvencija rotacije elektromagnetskog polja izravno je proporcionalna karakterističnoj frekvenciji izmjenične struje.
Postoji inverzno proporcionalna ovisnost brzine okretanja o broju parova polova u namotajima statora. S obzirom da je fazni pomak 60 °, ovisnost brzine rotora (u rpm) može se izraziti formulom:
n 1 = ( f 1 * 60) / p, gdje je n 1 sinkrona frekvencija, f 1 je frekvencija izmjenične struje, a p je broj parova polova.
Kao posljedica magnetske indukcije na jezgri rotora, u njemu će se pojaviti emf, što će zauzvrat uzrokovati pojavu električne struje u zatvorenom vodiču. Pojavit će se amper sila, pod djelovanjem koje će zatvorena petlja početi rotirati nakon magnetskog polja. U nazivnom načinu rada, brzina rotora malo zaostaje za brzinom vrtnje magnetskog polja stratora. Kad se frekvencije poklapaju, magnetski se tok zaustavlja, struja nestaje u namotima rotora, zbog čega se sila zaustavlja. Čim brzina vrtnje osovine zaostane, naizmjenične struje magnetskih polja nastavljaju djelovanje amperne sile.
Razlika u frekvenciji rotacije magnetskih polja naziva se frekvencija klizanja: n s = n 1 –n 2, a relativna vrijednost s, koja karakterizira zaostajanje, naziva se slip.
s = 100% * ( n s / n 1 ) = 100% * (n 1 - n 2 ) / n 1, gdje je n s frekvencija klizanja; n 1, n 2 - učestalost rotacije magnetskih polja statora odnosno rotora.
Da bi se smanjili harmonici EMF-a i ugasili pulsiranje momenta momenta, štapovi kratkog spoja malo se pokose. Još jednom pogledajte sliku. 2 i obratite pažnju na položaj šipki koje djeluju kao namotaji rotora, u odnosu na os rotacije.
Klizanje ovisi o mehaničkom opterećenju koje se primjenjuje na osovinu motora. Kod asinkronih elektromotora promjena parametara klizanja odvija se u rasponu od 0 do 1. Štoviše, u praznom hodu rotor koji je dobio zamah gotovo da nema aktivni otpor. S se približava nuli.
Povećanje opterećenja doprinosi povećanju klizanja, koje može doseći jedinicu, u trenutku zaustavljanja motora zbog preopterećenja. Takvo stanje je ekvivalentno načinu kratkog spoja i može onemogućiti uređaj.
Relativna jačina kašnjenja koja odgovara nazivnom opterećenju električnog stroja naziva se nominalni klizanje. Za male motore i motore prosječne snage ovaj pokazatelj varira u malom rasponu - od 8% do 2%. Kada je rotor motora u stanju mirovanja, klizanje teži na 0, a kada radi na praznom hodu, približava se 100%.
Tijekom pokretanja elektromotora, njegovi namoti su pod opterećenjem, što dovodi do naglog povećanja ulaznih struja. Nakon dostizanja nazivne snage, elektromotori s kratkim spojem zavojnice neovisno vraćaju nazivnu frekvenciju rotora.
Obratite pozornost na krivulju zakretnog momenta klizanja prikazanu na sl. 3.

Kako se okretni moment povećava, koeficijent s mijenja se od 1 do 0 (vidi odjeljak "motorno područje"). Također povećava brzinu rotacije osovine. Ako brzina okretanja vratila prelazi nominalnu frekvenciju, tada će zakretni moment postati negativan, a motor će preći u način proizvodnje (segment "generirajuće regije"). U ovom načinu rada, rotor će osjetiti magnetski otpor, što će dovesti do kočenja motorom. Oscilatorni proces će se ponavljati sve dok se okretni moment ne stabilizira, a klizanje će se približiti nominalnoj vrijednosti.
Prednosti i nedostaci
Široko rasprostranjena upotreba asinkronih motora s kratkospojnim rotorima je zbog njihovih nespornih prednosti:
- stabilnost rada pri optimalnim opterećenjima;
- visoka pouzdanost u radu;
- niski operativni troškovi;
- trajnost rada bez održavanja;
- relativno visoka učinkovitost;
- niske cijene, u usporedbi s modelima baziranim na faznim rotorima i drugim vrstama elektromotora.
Među nedostacima može se primijetiti:
- visoke startne struje;
- osjetljivost na padove napona;
- omjeri niskog proklizavanja;
- potrebu za korištenjem uređaja kao što su frekvencijski pretvarači, startni otpornici, itd., za poboljšanje karakteristika električnog motora;
- ED s kaveznim rotorom trebaju dodatne sklopne upravljačke uređaje, u slučajevima kada je potrebno podesiti brzinu.
Elektromotori ovog tipa imaju pristojne mehaničke karakteristike. Unatoč nedostacima, oni vode u smislu njihove primjene.
Glavne tehničke značajke
Ovisno o klasi motora, njegove tehničke karakteristike variraju. U okviru ovog članka ne postavlja se zadatak smanjenja parametara svih postojećih klasa motora. Usredotočit ćemo se na opis glavnih tehničkih karakteristika elektromotora klase 56 A2 - 80 B2.
U ovom malom procepu na modelnoj liniji elektromotora s kratkospojnim rotorima može se uočiti sljedeće:
Raspon snage od 0, 18 kW (klasa 56 A2) do 2, 2 kW (klasa 80 B2).
Struja pri maksimalnom naponu je od 0, 55 A do 5A.
Učinkovitost od 66% do 83%.
Brzina okretanja vratila za sve modele od navedenog raspona je 3000 o / min.
Specifikacije pojedinog motora navedene su u putovnici.
veza
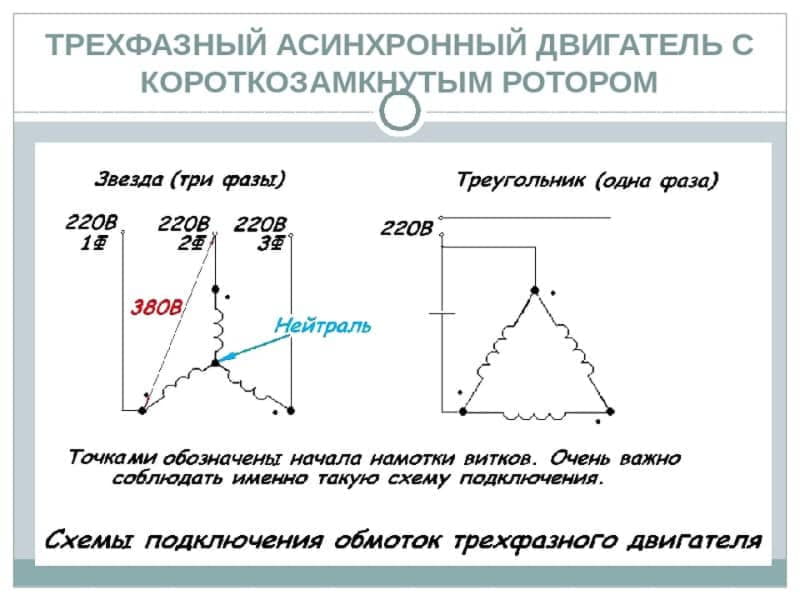
Statorski namoti trofaznog ADKR-a mogu se spojiti prema shemi "trokuta" ili "zvijezda". Istodobno, zvjezdici zahtijeva napon veći od trokuta.
Imajte na umu da električni motor povezan na različite načine s istom mrežom troši različitu snagu. Dakle, ne možete spojiti električni motor, dizajniran za shemu "zvijezda" na principu trokuta. Ali kako bi se smanjile početne struje, moguće je prebaciti vrijeme pokretanja kontakata zvijezde u trokut, ali tada će se i početni trenutak smanjiti.
Dijagrami ožičenja jasno su prikazani na slici 4.
Za povezivanje trofaznog elektromotora s jednofaznom strujom koriste se fazni pomični elementi: kondenzatori, otpornici. Primjeri takvih veza prikazani su na slici 5. Možete koristiti i zvjezdicu i trokut.
Da bi se upravljalo radom motora, na strujni krug statora priključuju se dodatni uređaji.