
- uvod
- Upravljanje motorom pomoću Arduino i generirani PWM signal
- Kontrola istosmjernog motora pomoću H-mosta
- Što je L298N upravljački program?
- Princip upravljanja motorom s Arduinom i upravljačkim programom L298N
- Jednostavan primjer Arduina s upravljačkim programom L298N
Pomozite razvoju web mjesta, dijelite članak s prijateljima!
U ovom primjeru, razmotrit ćemo jedan od načina upravljanja DC motorom, koji se implementira preko Arduino ploče i L298N pogonitelja. Unatoč velikom broju mogućnosti za upravljanje radom električnih DC strojeva, ova je shema mnogo popularnija. Budući da se može koristiti za obavljanje prilično širokog raspona različitih operacija, u usporedbi sa sklopovima koji koriste druge upravljačke programe i mikrokontrolere.
uvod
DC električni stroj je jedan od najlakših za rukovanje, zahvaljujući kojem se često koristi u radio-elektronici i robotskim uređajima. Ova popularnost je zbog jednostavnosti snage i kontrole - za to se dva izvora napajaju iz izvora emf (negativno i pozitivno), a kad struja teče kroz namota, vratilo se okreće. Pri promjeni polariteta motora dolazi do kretanja unatrag.
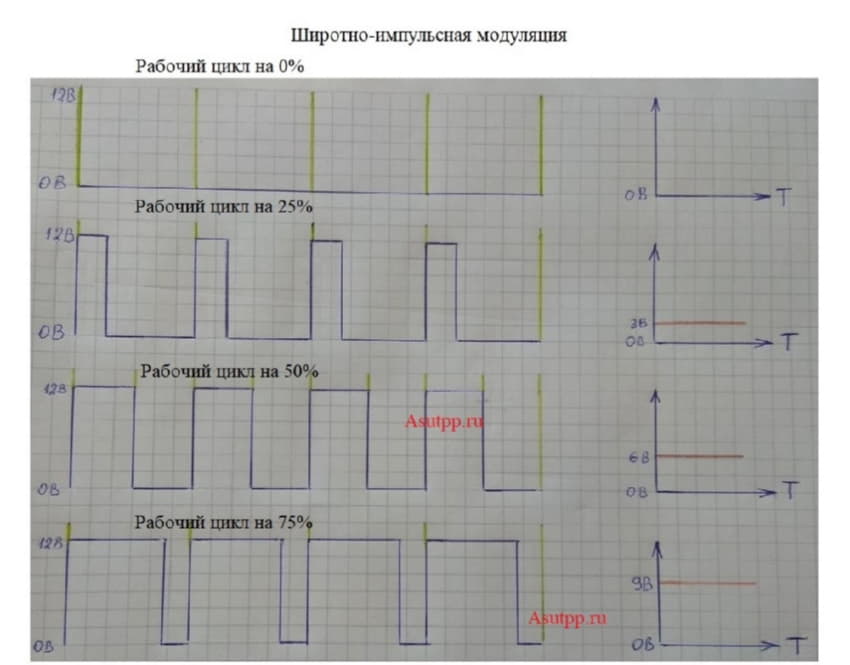
U radio elektroničkim sustavima, takve metode upravljanja radom motora nazivaju se modulacija širine impulsa (PWM). Takav proces karakterizira promjena trajanja primijenjenog napona ili oblika njegovog signala.
Kako mogu promijeniti brzinu rotacije pomoću PWM?
Pomoću PWM metode, naizmjenično primijenite i odvojite napon na namotaje motora s visokom frekvencijom. Učestalost impulsa može doseći nekoliko kilograma.
Veličina srednjeg napona primijenjenog na motor ovisi o PWM valnom obliku. Oblik signala određen je radnim ciklusom, koji se može prikazati kao omjer vremena isporuke signala i ukupnog vremena (zbroja napona napajanja i vremena gašenja). Rezultat je bezdimenzionalna količina, koja se izražava u postocima - koliko je vremena od ukupnog perioda napon primijenjen na motor. U niskonaponskim sustavima od 5, 12, 24 ili 36 V, primjenjuje se ciklus od 25%, 50%, 75% i 100%.
Upravljanje motorom pomoću Arduino i generirani PWM signal
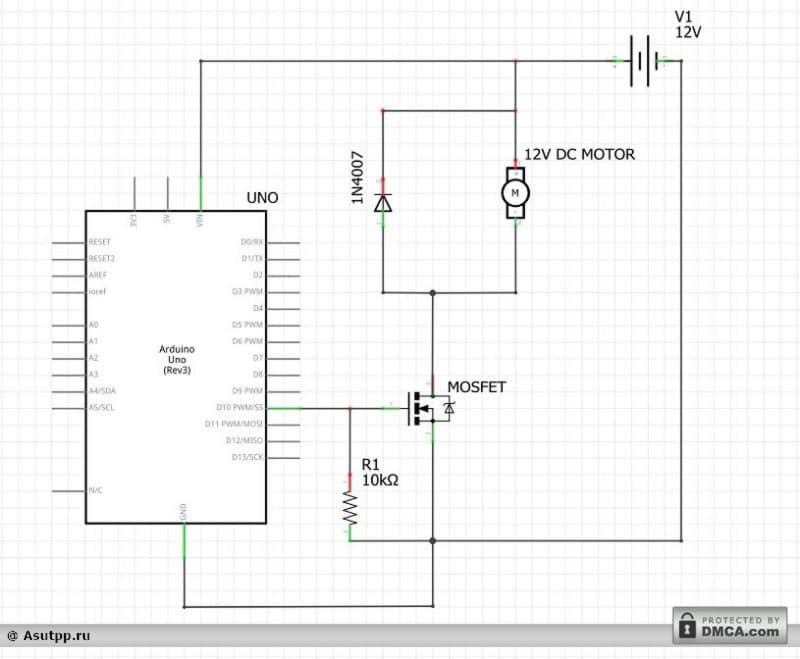
Za početak postupka, ploča generira signal koji se dovodi do namota motora. Za kontrolu veličine signala koji se dovodi u radni krug, tranzistor se uključuje. Koji je uključen u prazninu glavne mreže, a na njegovoj osnovi je kontrolni impuls od Arduina. Postavljanjem određenih parametara rada s nizom naredbi za Arduino, tranzistor će ići u otvoreno, zatvoreno ili otvoreno stanje.
Na donjoj slici možete vidjeti primjer sklopa u kojem se snaga motora kontrolira preko Arduina preko tranzistora. Kao što možete vidjeti, ovdje iz PWM izlaza signal se šalje na bazu tranzistora, a kroz kolektor i napon emitera će se primijeniti na namot.
Arduino se može programirati pomoću računala, au tu svrhu koriste se i posebni programi i klasični programski jezici. Kada programirate rad uređaja, možete koristiti standardni skup naredbi koje će omogućiti pristup najjednostavnijim naredbama. Ili ih skupite u kombinaciji kako biste oblikovali specifičnu logiku uređaja.
Primjer softverskih naredbi za rad gore navedene Arduino sheme uključivanja možete preuzeti s linka ispod. Pomoću njih možete kontrolirati brzinu rotacije, postupno povećavajući je na maksimalnu vrijednost, te je postupno smanjujući na točku.
Cjelovita skica projekta:
 Kontrola istosmjernog motora s Arduino UNO (340 bajtova, preuzeto: 84)
Kontrola istosmjernog motora s Arduino UNO (340 bajtova, preuzeto: 84)
Upotrijebljene naredbe:
- void setup - polje za postavljanje radnog izlaza iz PWM porta;
- void loop - polje za formiranje tijeka rada;
- motorSpeed - podešava brzinu vrtnje motora;
- analogWrite - postavlja rad određene izlazne ploče;
- delay - postavlja vrijednost vremenskog intervala.
S ovim programom i gornjom shemom možete lako promijeniti brzinu rotacije istosmjernog motora, ali bit će vrlo teško promijeniti smjer njezine rotacije. Budući da je potrebno promijeniti smjer toka električne struje kroz namotaje. Stoga je promjena smjera vrtnje mnogo prikladnija uz pomoć H-mosta na poluvodičkim pretvaračima.
Kontrola istosmjernog motora pomoću H-mosta
Ako uzmemo u obzir princip rada, N-most je logički sklop od četiri logička elementa (relejni ili poluvodički tip), sposoban za prelazak u dva stanja (otvoreni i zatvoreni). U ovom primjeru most je montiran na poluvodičima. Jednostavnim mijenjanjem stanja parova tih elemenata, motor će se okretati ili na jedan ili drugi način bez potrebe za prebacivanjem kontakata.
Ovaj uređaj dobio je ime zbog vanjske sličnosti slovom "H", gdje je svaki par tranzistora smješten u vertikalnim elementima slova, a sam kontrolirani motor je vodoravan. Primjer elementarnog H-mosta od četiri tranzistora prikazan je na slici ispod. Otvaranjem i zatvaranjem potrebnih elemenata sklopa u parovima, struja se može proći kroz namotaje u suprotnim smjerovima.
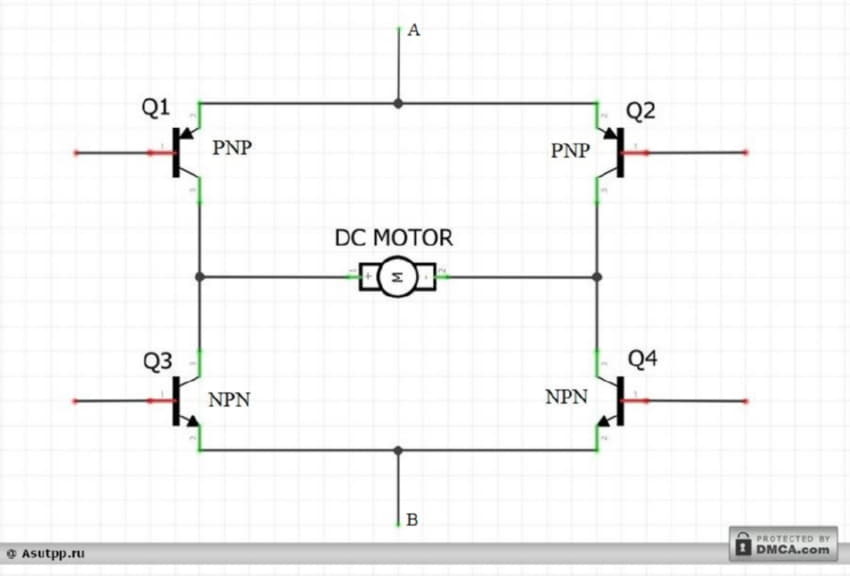
Pogledajte sliku, u ovoj shemi kontrola snage motora dolazi iz terminala A i B, na koje se primjenjuje kontrolni potencijal.
Princip određivanja smjera vrtnje u H-mostu je sljedeći:
- kada se impuls primijeni na bazama tranzistora Q1 i Q4 za otvaranje spoja, struja teče kroz namotaje motora u jednom smjeru;
- kada se na baze tranzistora Q2 i Q3 primijeni puls za otvaranje spoja, struja će teći u suprotnom smjeru, u usporedbi s prethodnom, i doći će do obrnutog kretanja;
- upareno otvaranje tranzistora Q1 i Q3, Q2 i Q4 dovodi do kočenja rotora;
- otvaranje tranzistora u sekvenci Q1 i Q2 ili Q3 i Q4 je potpuno neprihvatljivo, jer će uzrokovati kratki spoj u krugu.
Pomoću H-mosta za upravljanje radom istosmjernog motora možete provesti kompletan skup operacija za električni stroj bez potrebe za ponovnim povezivanjem njegovih elektroda. S obzirom na poteškoće pri odabiru tranzistora i njihovo povezivanje s H-mostom, mnogo je lakše koristiti već postojeće upravljačke programe koji imaju tu funkciju. Među njima najpopularniji su L293D i L298N.
Uspoređujući dva upravljačka programa, valja napomenuti da je L298N superiorniji od L293D u radnim parametrima i dostupnim opcijama. Unatoč činjenici da je L293D jeftiniji model, L298N, zbog svojih značajnih prednosti, počeo se češće koristiti. Stoga u ovom primjeru uzimamo u obzir princip kontrole motora pomoću L298N pogonitelja i Arduino ploče.
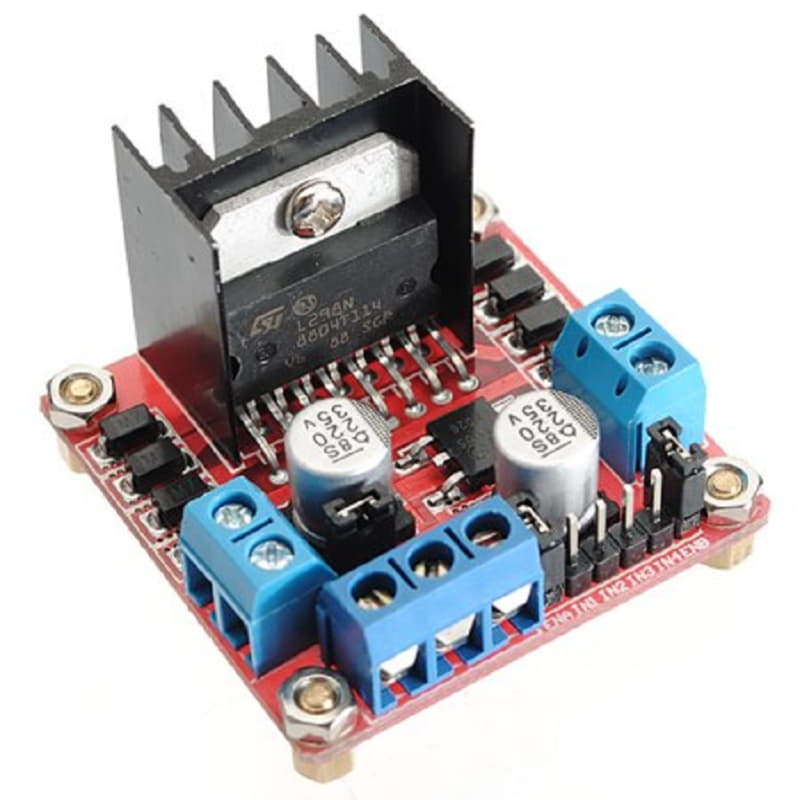
Što je L298N upravljački program?
Ova ploča sadrži mikrokrugu i 15 izlaza za generiranje upravljačkih signala. Namijenjen je prijenosu signala radnim jedinicama induktivnog tipa - namotima motora, zavojnicama releja itd. Strukturno, L298N vam omogućuje da spojite do dva takva elementa, na primjer, kroz njega možete istovremeno kontrolirati dva koračna motora.
Dijagram ispod prikazuje primjer raspodjele pinova L298N iz radnog čipa.
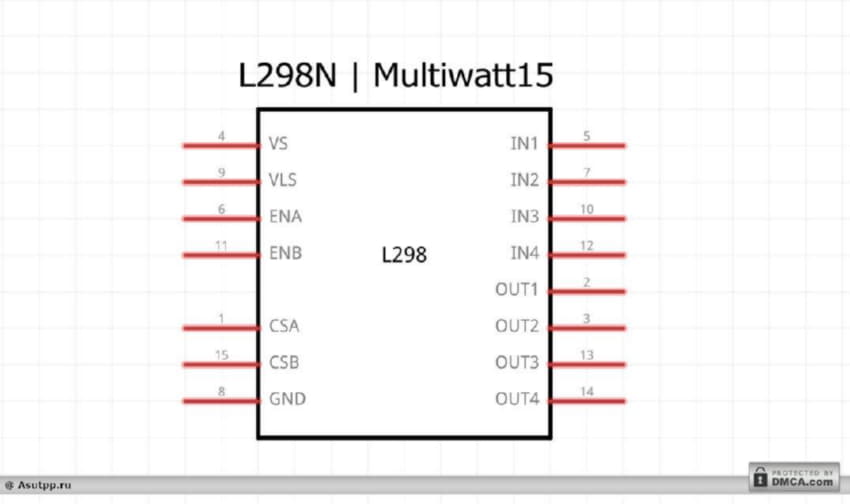
- Vss - napajanje za logičke sklopove u 5V;
- GND - nulti izlaz (tzv. Tijelo);
- ULAZI 1, ULAZ 2, ULAZ 3, ULAZ 4 - omogućuju glatko povećanje i smanjenje brzine vrtnje motora;
- OUTPUT1, OUTPUT2 - vodiči za napajanje prvog induktivnog opterećenja;
- OUTPUT3, OUTPUT4 - vodiči za napajanje drugog induktivnog opterećenja;
- Vs - izlaz za uključivanje;
- ENABLE A, B - igle, pomoću kojih se kanali upravljaju odvojeno, mogu uspostaviti aktivni i pasivni način rada (s podesivom brzinom vrtnje i uz utvrđenu brzinu);
- TRENUTNO OSVETLJENJE A, B - zaključci za postavljanje trenutnog načina.
Princip upravljanja motorom s Arduinom i upravljačkim programom L298N
Zahvaljujući ugrađenom mostu u L298N vozaču, ova ploča omogućuje istovremenu kontrolu dvaju električnih strojeva od dva para igala odjednom. Logički sklop u ovom uređaju radi od napona od 5V, a snaga električnih strojeva se može napraviti do uključivo 45V. Maksimalna dopuštena struja za jedan kanal ploče je 2A.
U pravilu, ovaj vozač ima modularni dizajn, zbog čega modul uključuje radne elemente, izlaze i priključke potrebne za prijenos upravljačkih signala. Primjer takvog upravljačkog programa prikazan je na slici ispod:
Sada analiziramo kako se upravljanje motorom provodi pomoću upravljačkog programa L298N. Motor je spojen na vijčane stezaljke - par za napajanje svakog motora. Preostali terminali su dizajnirani za napajanje plus i minus, kao i za primanje podnapona (napajaju se s određenom razinom napona napajanja od kojeg motori rade, a interni pretvarač ga spušta na 5V za vlastite logičke sklopove). Priključni izlazi ploče obavljaju modulaciju širine impulsa pri generiranju radnih signala.
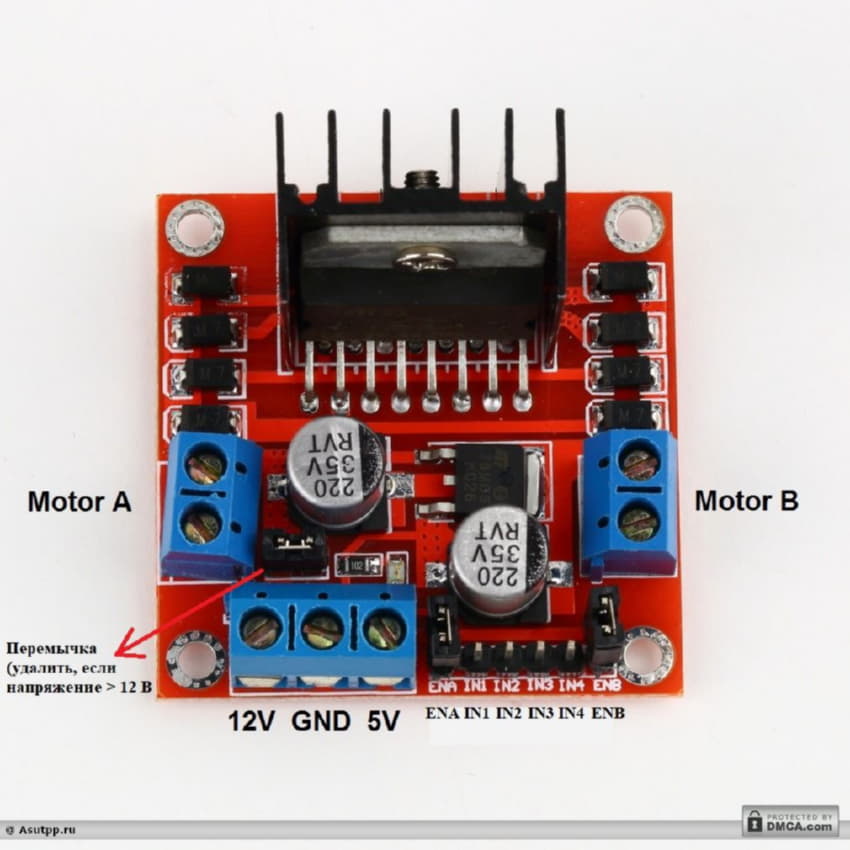
Treba napomenuti da terminal s tri terminala ne samo da opskrbljuje ploču opskrbnim naponom, već vam također omogućuje da ga već pretvorite za vlastite potrebe vozača od 5V, kao što je prikazano na gornjoj slici. Ovaj izlaz se može koristiti za napajanje istog Arduina ili za bilo koje druge uređaje koji se napajaju 5V.
Važan trenutak za dobivanje 5V iz ovog terminalnog izlaza je instalacija crnog kratkospojnika, koji je odgovoran za pretvaranje naponske razine osim 5 V, pod uvjetom da je njena razina ispod 12V. Ako je razina napona napajanja viša od 12V, kratkospojnik se mora ukloniti, jer interni pretvarač nije namijenjen za njega, a sama ploča mora biti napajana od 5V kroz treći izlaz istog terminalnog bloka.
Jednostavan primjer Arduina s upravljačkim programom L298N
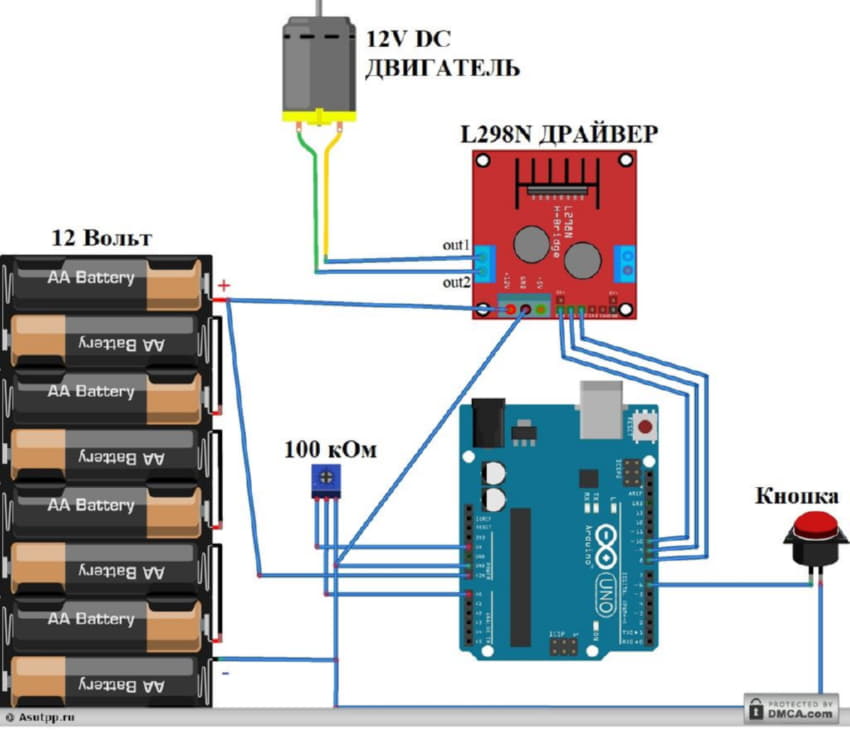
Sada ćemo razmotriti primjer jednostavne sheme dijeljenja Arduino i L298N. Ova opcija omogućuje kontrolu brzine vrtnje vratila i njegovog smjera od istosmjernog motora. U tu svrhu se na osobnom računalu postavlja poseban program koji će odrediti generiranje PWM signala iz L298N i smjer protoka struje kroz H-most. Naravno, za formiranje sheme će zahtijevati nekoliko dodatnih komponenti koje će omogućiti povezivanje vozača, Arduina, računala i motora.
Popis potrebnih komponenti za sastavljanje sheme:
- Arduino UNO - najjednostavniji model linije, ali njegova funkcionalnost će biti više nego dovoljno. Ako koristite napredniju verziju, onda će dobro obaviti posao.
- Upravljački program L298N nije najpovoljniji upravljački program, ali ga ne možete zamijeniti drugim, jer načelo rada sličnih modela može biti potpuno drugačije.
- Motor od 12 V - u ovom se primjeru koristi električni DC stroj.
- Potenciometar 100 kΩ.
- Gumb za prebacivanje kruga.
- Napajanje 12 V - može se pojaviti bilo koja opcija, uključujući nekoliko baterija s prstima.
- Naknada za instalacijske stavke.
- Spajanje žica, po mogućnosti s spremnim čepovima za tatu / majku.
| sastavni dio | specifikacija | Broj | Gdje kupiti |
|---|---|---|---|
| Težak | UNO Rev.3.0 | 1 | veza |
| vozač | L298N | 1 | veza |
| Mini motor | 12V, DC, 6000 rpm | 1 | veza |
| Pogonski uređaj | 12 volti | 1 | veza |
| dugme | Micro SMD SMT | 1 | veza |
| potenciometar | 100 kΩ | 1 | veza |
| Spajanje žica | Tata-mama | veza |
Cijeli kod projekta:
 Kontrola istosmjernog motora pomoću Arduino UNO (491 bajtova, preuzeto: 104)
Kontrola istosmjernog motora pomoću Arduino UNO (491 bajtova, preuzeto: 104)
Praktična primjena.
Programiranje rada elektromotora široko se koristi u robotici, na primjer, vaš izum, opremljen kotačima, moći će se pomicati naprijed iu suprotnom smjeru. Kao što možete vidjeti, zajednički rad Arduina i L298N vozača moći će riješiti ovaj problem bez ikakvih problema. U isto vrijeme, možete osigurati istodoban rad dva motora odjednom od jednog vozača, odnosno kontrolirati dva kotača odjednom, i neovisno jedan o drugom.
U drugoj izvedbi, motori kojima upravlja Arduino i L298N pokretač mogu pomicati ruke robota u smjeru naprijed i natrag, kretati se linearnom stazom, itd. Cijeli popis značajki Arduino ploče i L298N upravljačkog programa ograničen je samo vašom maštom, tako da možete sami pronaći zanimljive aplikacije za njih.