
- Što je koračni motor?
- Uređaj i princip rada
- Vrste steper motora
- Povezivanje koračnog motora
- Upravljanje koračnim motorom
- Najjednostavniji upravljački koračni motor to učinite sami
- Korisni videozapis
Pomozite razvoju web mjesta, dijelite članak s prijateljima!
Za rad gotovo svih električnih uređaja potrebni su posebni pogonski mehanizmi. Predlažemo da razmotrimo što je to koračni motor, njegov dizajn, princip rada i dijagrame ožičenja.
Što je koračni motor?
Koračni motor je električni stroj namijenjen pretvaranju električne energije mreže u mehaničku energiju. Strukturno se sastoji od namota statora i magnetski mekog ili magnetski tvrdog rotora. Karakteristična značajka koračnog motora je diskretna rotacija u kojoj određeni broj impulsa odgovara određenom broju dovršenih koraka. Takvi uređaji se najčešće koriste u CNC strojevima, robotici, uređajima za pohranu podataka i čitanju.
Za razliku od drugih tipova strojeva, koračni motor se ne okreće kontinuirano, već u koracima od kojih dolazi naziv uređaja. Svaki takav korak je samo dio ukupnog prometa. Broj koraka potrebnih za potpunu rotaciju vratila će se razlikovati, ovisno o shemi spajanja, vrsti motora i načinu upravljanja.
Prednosti i nedostaci koračnog motora
Prednosti upravljanja koračnim motorom su:
- Kod koračnih motora kut zakretanja odgovara broju primijenjenih električnih signala, dok se nakon zaustavljanja rotacije održava puni trenutak i fiksiranje;
- Točno pozicioniranje - daje 3 - 5% postavljenog koraka, koji se ne akumulira od koraka do koraka;
- Omogućuje pokretanje, okretanje, zaustavljanje velike brzine;
- Razlikuje se visokom pouzdanošću zbog odsutnosti komponenti za trljanje, za razliku od kolektora;
- Za pozicioniranje koračni motor ne zahtijeva povratnu informaciju;
- Može proizvesti niske brzine vrtnje za izravno primijenjeno opterećenje bez mjenjača;
- Relativno niža cijena u usporedbi s istim servosom;
- Pruža široki raspon brzine vratila za regulaciju broja okretaja mijenjajući frekvenciju električnih impulsa.
Nedostaci korištenja koračnog motora su:
- Može postojati rezonantni učinak i klizanje steper jedinice;
- Postoji mogućnost gubitka kontrole zbog nedostatka povratnih informacija;
- Količina utrošene električne energije ne ovisi o prisutnosti ili odsutnosti opterećenja;
- Složenost upravljanja zbog određenog kruga
Uređaj i princip rada
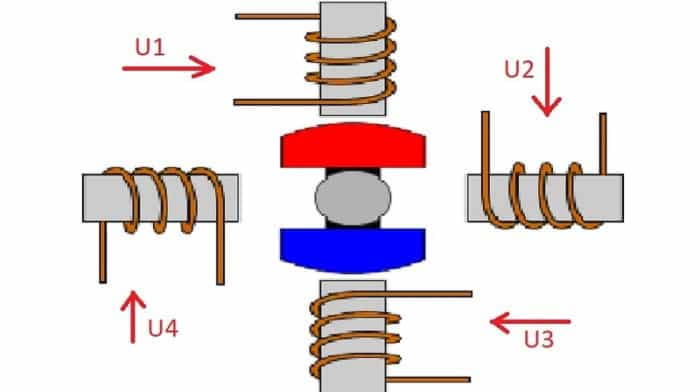
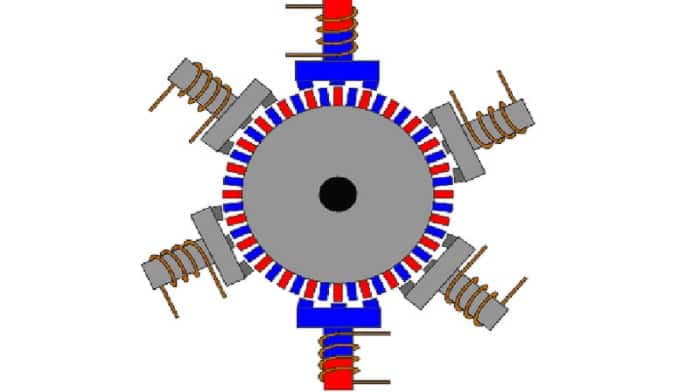
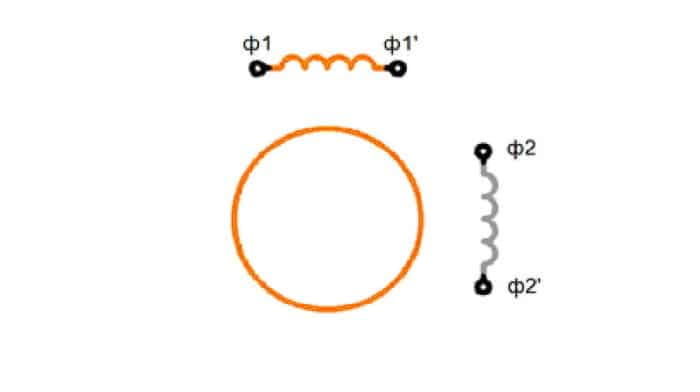
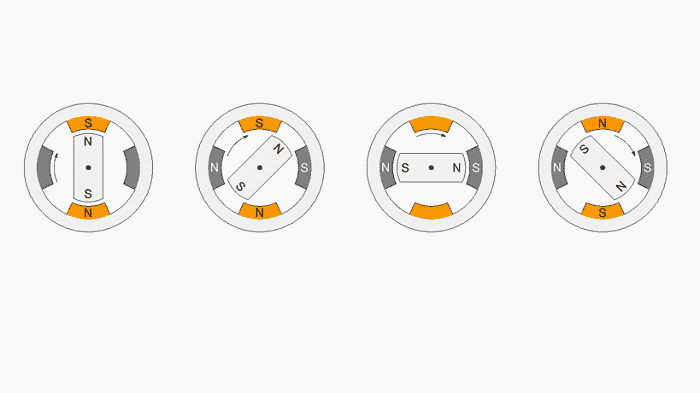
Slika 1 prikazuje 4 namota koji se odnose na stator motora, a njihov raspored je postavljen tako da su pod kutom od 90 ° jedan u odnosu na drugi. Iz toga slijedi da takav stroj karakterizira veličina koraka od 90 °.
U trenutku kada se napon U1 dovodi do prvog namota, rotor se pomiče na istih 90 °. U slučaju naizmjenične primjene napona U2, U3, U4 na odgovarajuće namote, osovina će se nastaviti okretati do završetka punog kruga. Nakon toga se ciklus ponavlja. Za promjenu smjera vrtnje dovoljno je promijeniti redoslijed kojim se impulsi dovode u odgovarajuće namotaje.
Vrste steper motora
Kako bi se osigurali različiti parametri rada, važni su i veličina koraka kojim će se osovina pomaknuti i trenutak primjene za kretanje. Varijacije ovih parametara postižu se konstrukcijom samog rotora, načinom spajanja i konstrukcijom namota.
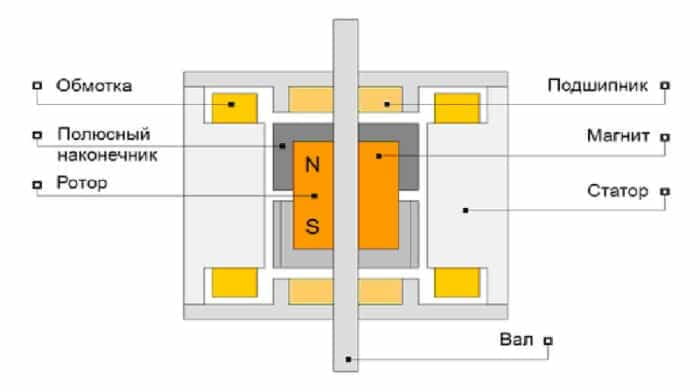
Dizajn rotora
Rotirajući element omogućuje magnetsku interakciju s elektromagnetskim poljem statora. Zbog toga, njegove konstrukcijske i tehničke značajke izravno određuju način rada i parametre rotacije koračne jedinice. Kako bi se u praksi odredio tip koračnog motora, s isključenom mrežom potrebno je okretati osovinu, ako osjećate otpornost, to ukazuje na prisutnost magneta, inače je to dizajn bez magnetskog otpora.
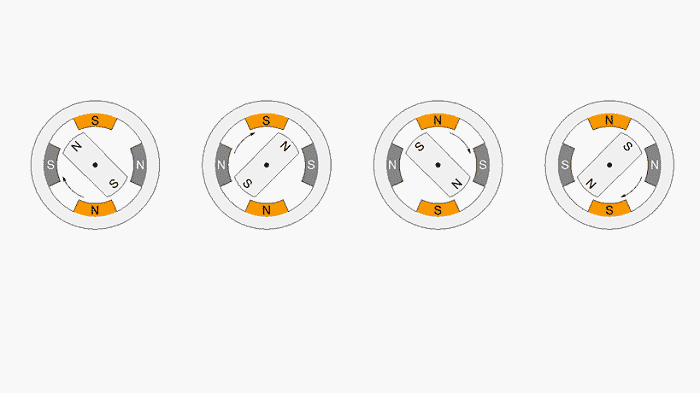
mlaz
Reaktivni koračni motor nije opremljen magnetom na rotoru, već je izrađen od mekih magnetskih legura, u pravilu se sastavlja iz ploča radi smanjenja indukcijskih gubitaka. Dizajn u poprečnom presjeku nalikuje zupčaniku. Polovi namotaja statora pokreću se suprotnim parovima i stvaraju magnetsku silu za pomicanje rotora, koji se kreće od izmjeničnog strujanja električne struje u parovima namotaja.
Značajna prednost ove izvedbe koračnog pogona je odsutnost zapornog momenta koji je formiran od strane polja u odnosu na učvršćenje. U stvari, to je isti sinkroni motor, u kojem se rotor okreće u skladu sa poljem statora. Nedostatak je smanjenje vrijednosti zakretnog momenta. Raspon za mlazni motor kreće se od 5 do 15 °.
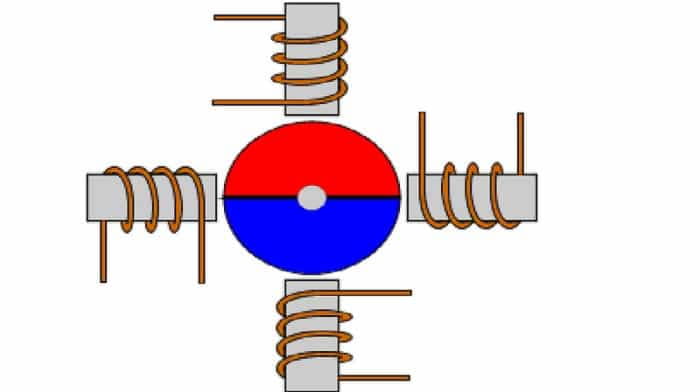
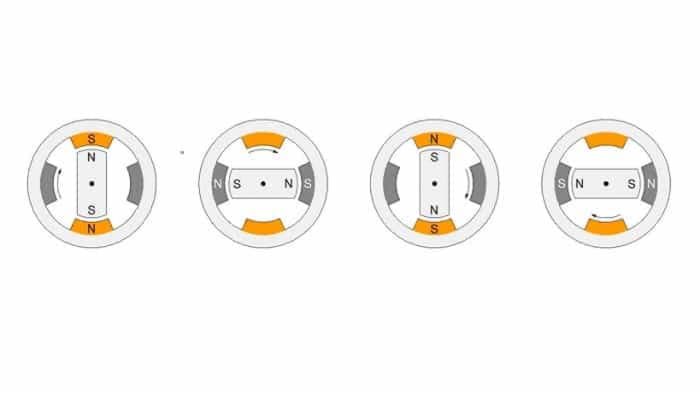
S trajnim magnetima
U tom slučaju, pokretni element koračnog motora sastavljen je od permanentnog magneta, u kojem mogu postojati dva ili više polova. Rotacija rotora osigurana je privlačenjem ili odbijanjem magnetskih polova električnim poljem kada se napon primijeni na odgovarajuće namote. Za ovu konstrukciju kutni nagib je 45-90 °.
hibrid
Dizajniran je tako da kombinira najbolje kvalitete prethodnih dvaju modela, zbog čega uređaj ima manji kut i nagib. Njegov rotor je u obliku cilindričnog stalnog magneta, koji je magnetiziran uzduž uzdužne osi. Strukturno izgleda kao dva okrugla stupa, na čijoj su površini zubi rotora magnetskog materijala. Ovo rješenje omogućilo je izvrsno držanje i okretni moment.
Prednosti hibridnog koračnog motora sastoje se u njegovoj visokoj točnosti, glatkoći i brzini kretanja, malim koracima - od 0, 9 do 5 °. Koriste se za vrhunske CNC strojeve, računalne i uredske uređaje i modernu robotiku. Jedini nedostatak je relativno visoka cijena.
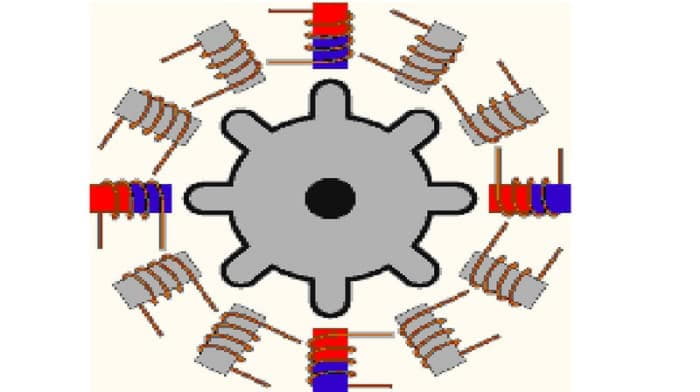
Na primjer, analizirajmo varijantu hibridnih step-down motora s 200 koraka pozicioniranja vratila. Prema tome, svaki od cilindara će imati 50 zuba, jedan od njih je pozitivni pol, drugi je negativan. Osim toga, svaki pozitivni zub se nalazi nasuprot utoru u negativnom cilindru i obrnuto. Strukturno, izgleda ovako:
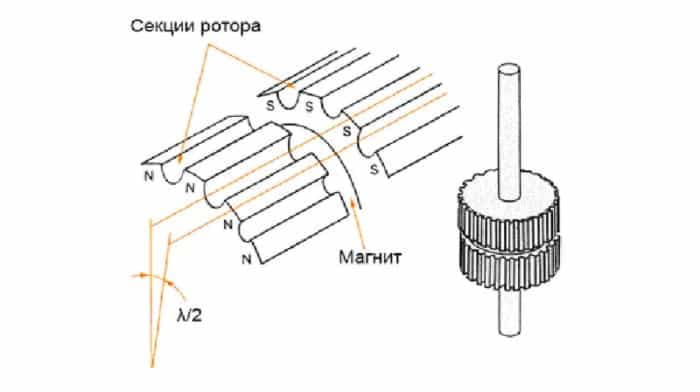
Zbog toga se na osovini koračnog motora dobiva 100 izmjeničnih polova s izvrsnim polaritetom. Stator također ima zube, kao što je prikazano na slici 6 ispod, osim zazora između njegovih komponenti.
Zahvaljujući takvoj izvedbi moguće je postići pomak istog južnog pola u odnosu na stator u 50 različitih položaja. Zbog razlike u polupozadi između sjevernog i južnog pola postiže se mogućnost kretanja u 100 položaja, a fazni pomak za četvrtinu podjele daje mogućnost povećanja broja koraka zbog sekvencijalne pobude za još dva puta, odnosno do 200 koraka kutne osovine po 1 revoluciji.
Obratite pažnju na sliku 6, princip rada takvog koračnog motora leži u činjenici da kada se par struja dovodi u suprotne namote, suprotni polovi rotora smješteni iza zubaca statora se povlače i slično se ponavlja ispred njih u smjeru vrtnje.
Prema vrsti namota
U praksi je koračni motor višefazni motor. Glatkoća rada u kojoj izravno ovisi o broju namotaja - što ih je više, to je glatko okretanje, ali što je veći trošak. U ovom slučaju, moment od broja faza se ne povećava, iako bi za normalan rad njihov minimalni broj na statoru elektromotora trebao biti najmanje dva. Broj faza ne određuje broj namota, pa dvofazni koračni motor može imati četiri ili više namota.
unipolarni
Unipolarni koračni motor je različit po tome što spojni krug namota ima granu od središnje točke. Zbog toga se magnetski polovi lako mijenjaju. Nedostatak ovog dizajna je upotreba samo jedne polovice raspoloživih okreta, zbog čega je postignut manji okretni moment. Stoga su velike.
Kako bi koristili svu snagu svitka, prosječni izlaz ostaje nepovezan. Razmotrimo dizajn unipolarnih jedinica, mogu sadržavati 5 i 6 zaključaka. Njihov broj ovisi o tome je li srednja žica odvojena od svakog namota motora ili su međusobno povezani.
bipolarni
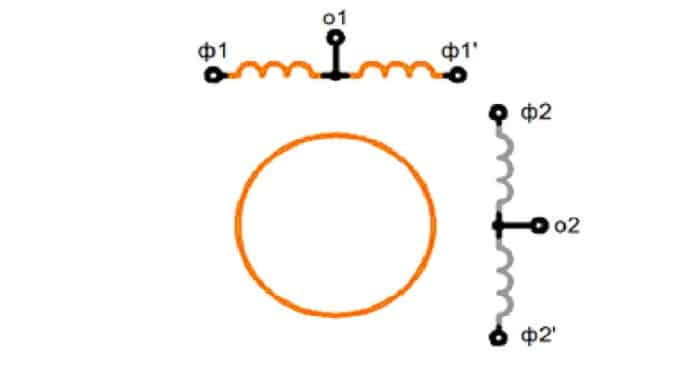
Bipolarni koračni motor je spojen na regulator preko 4 pina. U ovom slučaju, namoti se mogu spojiti unutar i serijski i paralelno. Razmotrimo primjer njegova rada na slici.
U konstruktivnoj shemi takvog motora, u svakoj fazi se može vidjeti jedna uzbudna namota. Zbog toga, promjena smjera struje zahtijeva uporabu posebnih upravljačkih programa u elektroničkom krugu (elektronički čipovi namijenjeni za kontrolu). Da biste postigli taj učinak, možete upotrijebiti uključivanje H-mosta. U usporedbi s prethodnim, bipolarni uređaj pruža isti trenutak s mnogo manjim dimenzijama.
Povezivanje koračnog motora
Za napajanje namota potreban vam je uređaj koji može proizvesti kontrolni puls ili niz impulsa u određenom nizu. Kao takve jedinice djeluju poluvodički uređaji za povezivanje koračnog motora, mikroprocesorski pogoni. U kojem postoji skup izlaznih terminala, svaki od njih određuje način rada i način rada.
Ovisno o dijagramu ožičenja, treba koristiti jedan ili drugi zaključak jedinice stepa. Kod različitih načina zbrajanja jednog ili drugog terminala na DC izlazni signal, dobiva se određena brzina vrtnje, nagib ili mikro korak linearnog kretanja u ravnini. Budući da je za neke zadatke potrebna niska frekvencija, a za druge visoka, isti motor može postaviti parametar na trošak vozača.
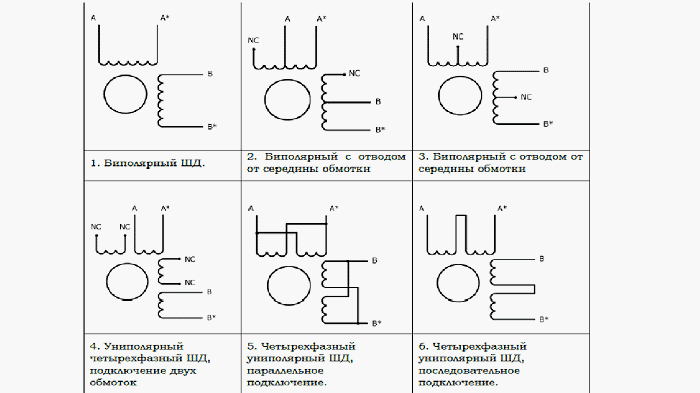
Tipični dijagrami ožičenja
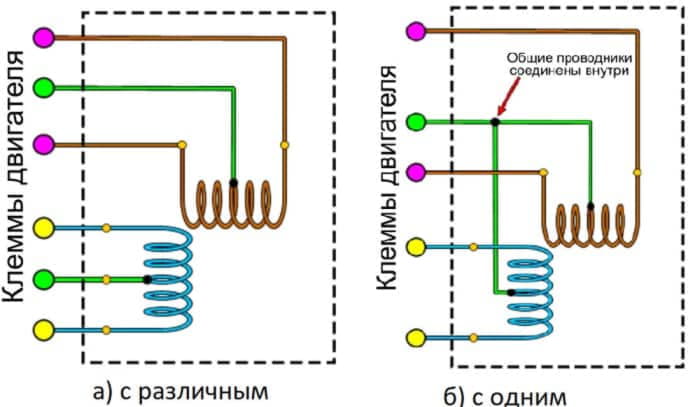
Ovisno o tome koliko su pinova zastupljeni na određenom stepper motoru: 4, 6 ili 8 pinova, mogućnost korištenja jednog ili drugog kruga za povezivanje će biti različita.Pogledajte slike, ovdje su tipične opcije za povezivanje steper mehanizma:
Pod uvjetom napajanja glavnih stupova koračnog stroja od istog vozača, prema ovim shemama, mogu se uočiti sljedeće karakteristične značajke rada:
- Vodovi su jedinstveno povezani s odgovarajućim priključcima uređaja. Kada su namoti spojeni u seriju, induktivnost namota se povećava, ali smanjuje struju.
- Pruža vrijednost putovnice električnih karakteristika. Kod paralelnog kruga struja se povećava i induktivnost se smanjuje.
- Kada je jedna faza povezana s namotom, zakretni moment pri malim brzinama se smanjuje i smanjuje veličinu struja.
- Kada je spojen, on provodi sve električne i dinamičke karakteristike prema putovnici, nominalnim strujama. Shema kontrole je uvelike pojednostavljena.
- On daje mnogo veći trenutak i koristi se za velike brzine;
- Kao i prethodni, namijenjen je povećanju zakretnog momenta, ali se koristi za male brzine.
Upravljanje koračnim motorom
Rad steper jedinice može se provesti na nekoliko načina. Svaka se razlikuje u načinu na koji se signali prenose na par polova. Total emitira metodu aktiviranja namota.
Val - u ovom načinu rada pobuđuje se samo jedan namotaj na koji se privlače polovi rotora. U ovom slučaju, koračni motor nije u stanju povući veliko opterećenje, jer daje samo polovicu trenutka.
Cijeli korak - u ovom načinu rada, istodobno se mijenjaju faze, tj. Oboje su istodobno uzbuđene. Zbog toga je osiguran maksimalni trenutak, u slučaju paralelnog spoja ili serijskog spajanja namota, stvorit će se maksimalni napon ili struja.
Pola koraka - je kombinacija dviju prethodnih metoda prebacivanja namota. Prilikom implementacije u koračni motor, naizmjenični napon se primjenjuje prvo na jedan svitak, a zatim na dva odjednom. To osigurava bolju fiksaciju pri maksimalnim brzinama i više koraka.
Za mekšu kontrolu i prevladavanje inercije rotora, koristi se mikro-stupanjska kontrola, kada se sinusoidni signal provodi pomoću mikro-koraka impulsa. Zbog čega sile interakcije magnetskih krugova u koračnom motoru dobivaju glatku promjenu i, kao rezultat, kretanje rotora između polova. Omogućuje značajno smanjenje kretanja koračnog motora.
Bez kontrolera
Za kontrolu motora bez četkica koristi se H-mostni sustav. Koji vam omogućuje da promijenite polaritet za obrnuti koračni motor. Može se izvoditi na tranzistorima ili mikročipovima koji stvaraju logički lanac za pomicanje tipki.
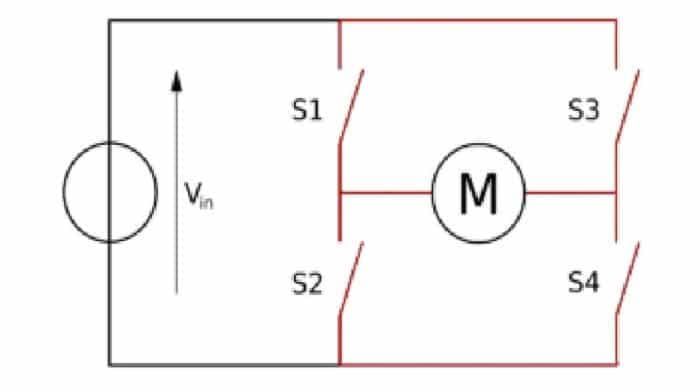
Kao što možete vidjeti, iz napajanja V napajanja se primjenjuje na most. Kada se spoje kontakti S1 - S4 ili S3 - S2, struja će teći kroz namotaje motora. To će uzrokovati rotaciju u jednom ili drugom smjeru.
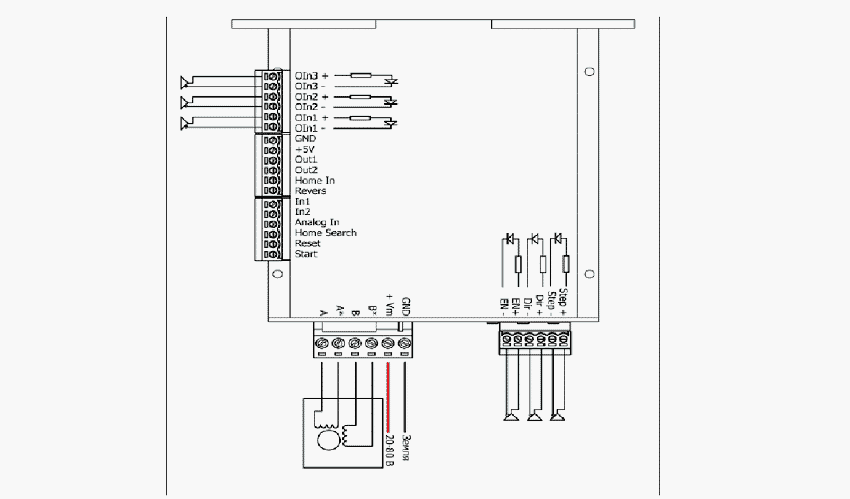
S regulatorom
Upravljački uređaj omogućuje upravljanje stepper motorom u različitim načinima rada. Regulator se temelji na elektronskoj jedinici koja formira grupe signala i njihov redoslijed, koji se šalje na zavojnice statora. Kako bi se spriječila mogućnost oštećenja u slučaju kratkog spoja ili druge hitne situacije na samom motoru, svaki izlaz je zaštićen s diodom koja ne propušta puls u suprotnom smjeru.
Popularne SM upravljačke sheme
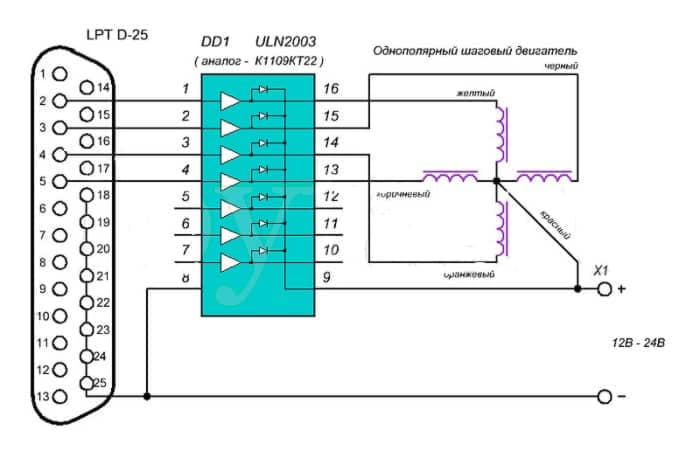
To je jedna od metoda bez interferencije. U tom slučaju, izravni i inverzni signal izravno je spojen na odgovarajuće polove. U takvoj shemi treba primijeniti zaštitni signalni vodič. Savršeno za male snage.

U ovoj shemi su spojeni pozitivni ulazi regulatora, koji su spojeni na pozitivni pol. U slučaju napajanja iznad 9V, u sklop mora biti uključen poseban otpornik kako bi se ograničila struja. Omogućuje vam da postavite potreban broj koraka sa strogo podešenom brzinom, odredite ubrzanje itd.
Najjednostavniji upravljački koračni motor to učinite sami
Kako bi se kod kuće sastavila shema vozača, neki elementi iz starih pisača, računala i druge opreme mogu biti korisni. Trebat će vam tranzistori, diode, otpornici (R) i mikrokrugovi (RG).
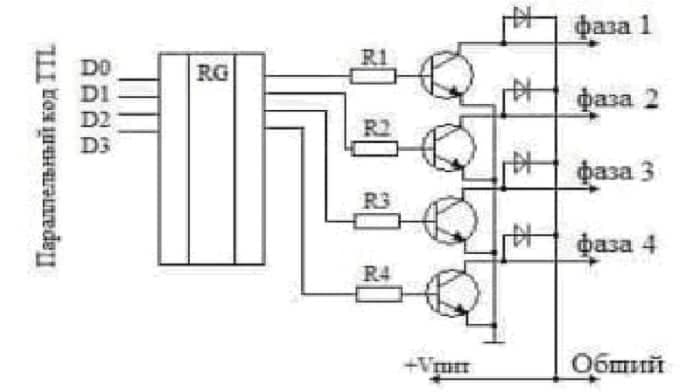
Za izradu programa, vodite se slijedećim načelom: pri primjeni logičke jedinice na jedan od D pinova (drugi signalni nula), tranzistor se otvara i signal prelazi na motornu zavojnicu. Tako se izvodi jedan korak.
Na temelju sheme, sastavlja se tiskana pločica, koju možete pokušati sami napraviti ili naručiti. Nakon toga, odgovarajući dijelovi su zalemljeni na ploču. Uređaj može kontrolirati stepper uređaj s kućnog računala spajanjem na običan USB priključak.