
- Opće informacije, uređaj, opseg
- Načelo djelovanja
- Razlike između kolektora i motora bez četkica
- Kako pokrenuti motor bez četkica?
- Kontrola motora bez četkica
- Trofazni DC motor bez četkica
- Prednosti i nedostaci
Pomozite razvoju web mjesta, dijelite članak s prijateljima!
Kućna i medicinska oprema, aeromodeliranje, pogoni za zatvaranje cijevi plinovoda i naftovoda - to nije potpuni popis primjena DC motora bez četkica. Pogledajmo strukturu i rad ovih elektromehaničkih pogona kako bismo bolje razumjeli njihove prednosti i nedostatke.
Opće informacije, uređaj, opseg
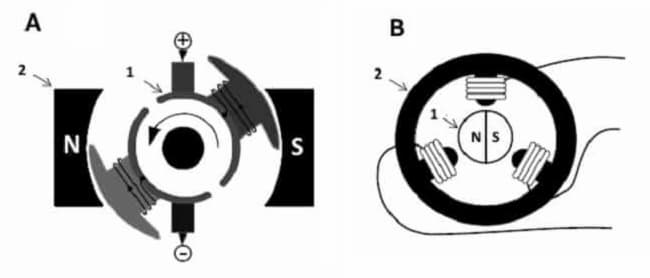
Jedan od razloga za iskazivanje interesa za bazu podataka je povećana potreba za brzim mikromotorima s preciznim pozicioniranjem. Unutarnja struktura takvih pogona prikazana je na slici 2.
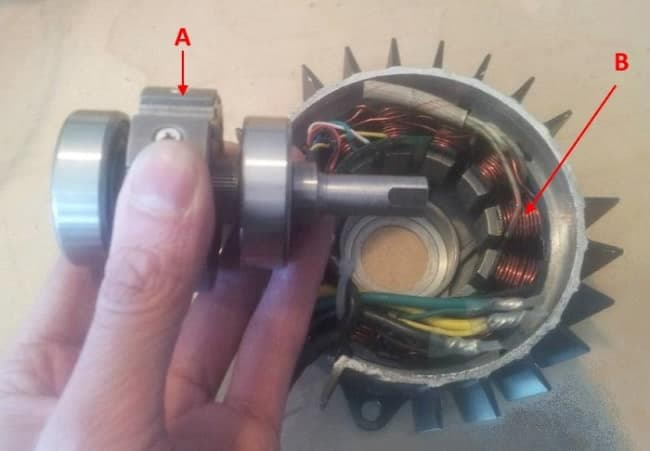
Kao što možete vidjeti, dizajn je rotor (sidro) i stator, prvi ima permanentni magnet (ili nekoliko magneta raspoređenih u određenom redoslijedu), a drugi je opremljen svici (B) za stvaranje magnetskog polja.
Važno je napomenuti da ovi elektromagnetski mehanizmi mogu biti ili s unutarnjim sidrom (ovaj tip dizajna može se vidjeti na slici 2) ili s vanjskim (vidi sl. 3).
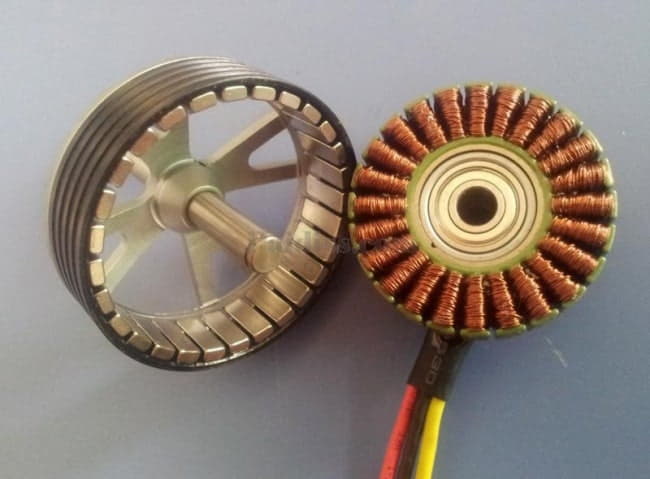
Prema tome, svaka od struktura ima specifičan opseg. Uređaji s unutarnjim sidrom imaju veliku brzinu okretanja, stoga se koriste u sustavima hlađenja, kao elektrane za bespilotne letjelice itd. Vanjski pogoni rotora koriste se tamo gdje se zahtijeva precizno pozicioniranje i otpornost na preopterećenje okretnog momenta (robotika, medicinska oprema, CNC strojevi, itd.).
Načelo djelovanja
Za razliku od drugih pogona, na primjer, asinkronog stroja za izmjeničnu struju, DB zahtijeva poseban kontroler koji uključuje namote tako da su vektori magnetskog polja armature i statora ortogonalni jedan prema drugome. To jest, u stvari, upravljački uređaj uređaja regulira moment koji djeluje na sidro baze podataka. Taj je proces jasno prikazan na slici 4.
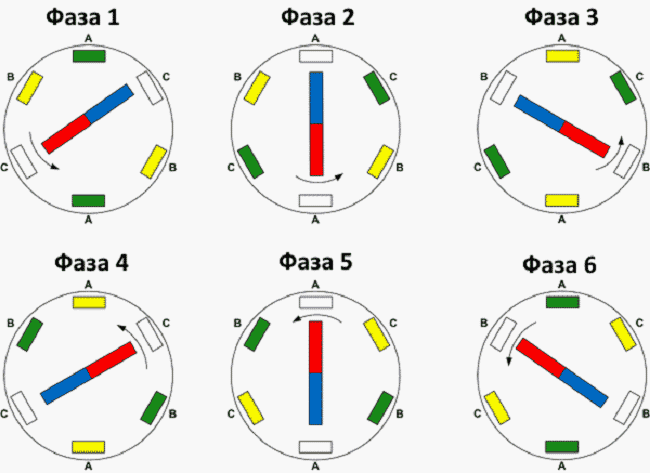
Kao što vidimo, za svaki pomak armature potrebno je izvršiti određenu komutaciju u namotaju statora motora bez četkica. Takav princip rada ne dopušta glatku kontrolu rotacije, ali daje mogućnost brzog dobivanja zamaha.
Razlike između kolektora i motora bez četkica
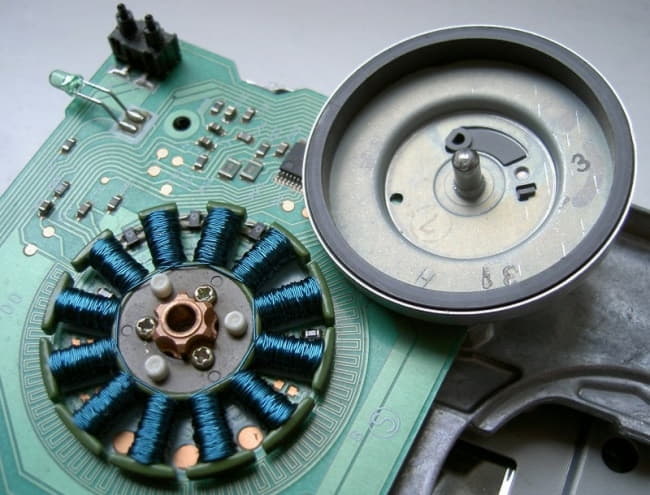
Pogon tipa kolektora razlikuje se od baze podataka po svojim konstrukcijskim značajkama (vidi sl. 5.) i po principu rada.
Razmotrite razlike u dizajnu. Iz slike 5 može se vidjeti da rotor (1 na slici 5) motora tipa kolektora, za razliku od motora bez četkica, ima svitke, koji imaju jednostavnu shemu namatanja, a trajni magneti (obično dva) su instalirani na statoru (2 na slici 5). ). Osim toga, na osovinu na koju su spojene četke instaliran je kolektor, koji napajaju armaturne namote.
Ukratko recite o principu strojeva za sakupljanje. Kada se napon primijeni na jedan od svitaka, on se pobuđuje i formira se magnetsko polje. On je u interakciji s permanentnim magnetima, što uzrokuje okretanje armature i kolektora. Kao rezultat, napajanje se prenosi na drugi namot i ciklus se ponavlja.
Učestalost rotacije armature ovog dizajna izravno ovisi o intenzitetu magnetskog polja, koje je, pak, izravno proporcionalno naponu. To jest, da bi se povećala ili smanjila brzina, dovoljno je povećati ili smanjiti razinu prehrane. A za obrnuto potrebno je promijeniti polaritet. Ova metoda upravljanja ne zahtijeva poseban regulator, budući da se taktni regulator može izvesti na temelju promjenjivog otpornika, a konvencionalni prekidač će raditi kao inverter.
Razmotrili smo značajke dizajna motora bez četkica u prethodnom poglavlju. Kao što se sjećate, njihova veza zahtijeva poseban kontroler, bez kojeg oni jednostavno neće raditi. Iz istog razloga ti se motori ne mogu koristiti kao generator.
Također je vrijedno napomenuti da se u nekim pogonima ovog tipa za učinkovitiju kontrolu položaj rotora nadzire pomoću Hall senzora. To značajno poboljšava performanse motora bez četkica, ali dovodi do viših cijena i tako skupog dizajna.
Kako pokrenuti motor bez četkica?
Kako bi pogoni ovog tipa radili, bit će potreban poseban regulator (vidi sliku 6). Bez nje, lansiranje je nemoguće.
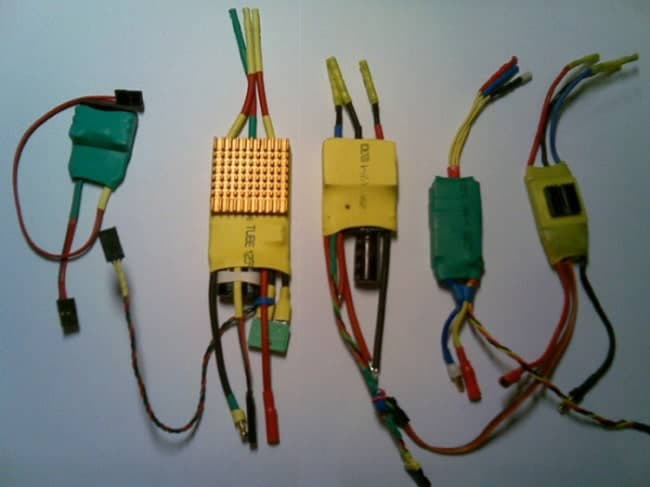
Sakupljanje takvog uređaja nema smisla, jeftinije je i pouzdanije za pripremu. Možete ga preuzeti prema sljedećim karakteristikama svojstvenim vozačima pwm kanala:
- Maksimalna dopuštena jakost struje, ova je značajka dana za normalan rad uređaja. Često proizvođači navode ovaj parametar u nazivu modela (na primjer, Phoenix-18). U nekim slučajevima, vrijednost se daje za vršni način rada, koji kontroler može podržati nekoliko sekundi.
- Maksimalna vrijednost standardnog napona za kontinuirani rad.
- Otpor unutarnjih krugova regulatora.
- Dopušteni broj okretaja određen je u rpm. Iznad te vrijednosti kontroler neće dopustiti povećanje rotacije (ograničenje se provodi na programskoj razini). Imajte na umu da se brzina vrtnje uvijek daje za bipolarne pogone. Ako je polni par veći, vrijednost treba podijeliti s njihovim brojem. Na primjer, broj je 60000 o / min, dakle za 6-magnetni motor, brzina vrtnje će biti 60000/3 = 20000 prm.
- Frekvencija generiranih impulsa, za većinu kontrolera, ovaj parametar se kreće od 7 do 8 kHz, skuplji modeli omogućuju vam da reprogramirate parametar, povećavajući ga na 16 ili 32 kHz.
Imajte na umu da prve tri karakteristike određuju snagu baze podataka.
Kontrola motora bez četkica
Kao što je gore spomenuto, upravljanje prekidačima pogonskih namota kontrolira se elektronikom. Da bi se utvrdilo kada treba izvršiti prekidač, vozač nadzire položaj sidra pomoću Hall senzora. Ako pogon nije opremljen takvim detektorima, tada se uzima u obzir povratni EMF, koji se pojavljuje u nepovezanim zavojnicama statora. Kontroler, koji je u biti hardversko-softverski kompleks, prati te promjene i postavlja redoslijed prebacivanja.
Trofazni DC motor bez četkica
Većina baza podataka izvršava se u tri faze. Za kontrolu takvog pogona, regulator ima DC-trofazni impulsni pretvarač (vidi sliku 7).
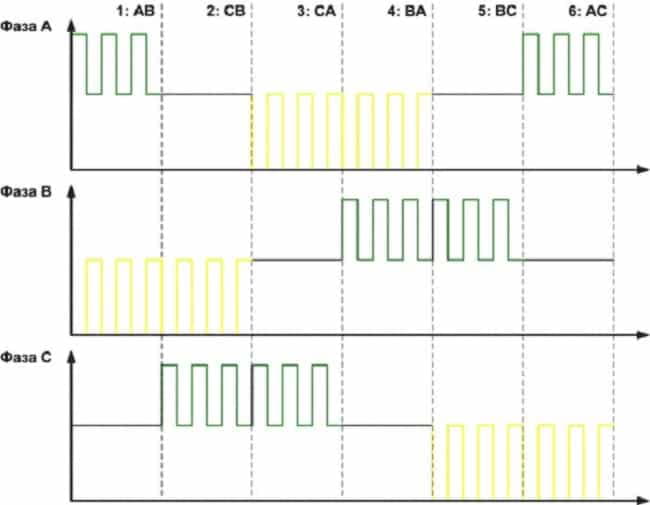
Da bi se objasnilo kako takav motor radi, potrebno je zajedno sa slikom 7 razmotriti sliku 4, gdje su naizmjenično prikazani svi stupnjevi pogona. Zapišite ih:
- Pozitivni impuls se dovodi u zavojnice „A“, dok se negativni impuls šalje „B“, što će rezultirati pomicanjem sidra. Senzori će otkriti njegovo kretanje i dati signal za sljedeću komutaciju.
- Zavojnica "A" je isključena, a pozitivni impuls prelazi u "C" ("B" ostaje nepromijenjen), zatim se signal šalje na sljedeći skup impulsa.
- Na “C” - pozitivno, “A” - negativno.
- Par "B" i "A", koji primaju pozitivne i negativne impulse.
- Pozitivni impuls ponovno se primjenjuje na "B", a negativan na "C".
- Zavojnice "A" su uključene (+ se napaja) i negativni impuls se ponavlja na "C". Tada se ciklus ponavlja.
U prividnoj jednostavnosti upravljanja ima puno poteškoća. Potrebno je ne samo pratiti položaj armature kako bi se proizveo sljedeći niz impulsa, već i kontrolirati brzinu vrtnje podešavanjem struje u svitcima. Osim toga, trebali biste odabrati najoptimalnije parametre za ubrzanje i usporavanje. Također treba imati na umu da kontroler treba biti opremljen jedinicom koja vam omogućuje kontrolu rada. Izgled takvog višenamjenskog uređaja može se vidjeti na slici 8. \ t

Prednosti i nedostaci
Električni motor bez četkica ima mnoge prednosti, i to:
- Vijek trajanja je mnogo dulji od uobičajenih kolektora kolektora.
- Visoka učinkovitost.
- Brzo postavljanje maksimalne brzine vrtnje.
- To je snažnije od CD-a.
- Odsutnost iskre tijekom rada omogućuje uporabu pogona u uvjetima opasnim od požara.
- Nije potrebno dodatno hlađenje.
- Jednostavno rukovanje.
Sada razmotrite kontra. Značajan nedostatak koji ograničava korištenje baze podataka je njihov relativno visok trošak (uzimajući u obzir cijenu vozača). Među neugodnostima treba pripisati nemogućnost korištenja baze podataka bez vozača, čak i za kratkoročno uključivanje, na primjer, za testiranje izvedbe. Problem se popravlja, osobito ako je potrebno premotavanje unatrag.